


Лазерные атмосферные системы связи
Оборудование для БПЛА
Беспилотные летательные аппараты
Оптоэлектронный генератор.
Новороссия
оптоэлектронный генератор ОЭГ СВЧ
Патенты2
шлемы
машина времени
Бортовая радиолокационная станция РЛС для БПЛА
“Разработка перспективных технологий построения бортового радиолокатора миллиметрового диапазона для БПЛА”
Автор статьи Миров С.В., Серия "Военные технологии", 2013г.
- Оснащения беспилотников БПЛА бортовой малогабаритной радиолокационной РЛС
Целью статьи является описание сверхмалогабаритного радиолокатора (РЛ) миллиметрового диапазона (ММД) для беспилотных летательных аппаратов (БПЛА), предназначенного для получения радиоизображения поверхности земли высокого разрешения и для обнаружения объектов с заданными габаритами и характеристиками механического движения.
Разработка технологий создания БПЛА является в настоящее время одним из перспективных направлений в области систем обзора земной поверхности и обнаружения объектов по данным наблюдения. Созданы и активно применяются в практике обороны и военных действий американские (ScanEagle,Integrator фирмы INSITU), израильские и английские БПЛА.

Integrator
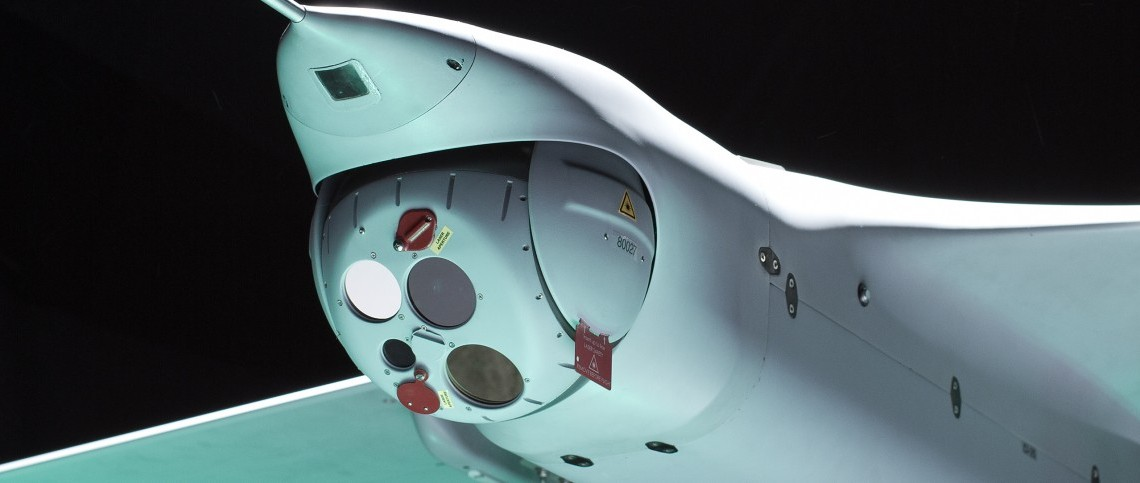
Находящиеся за рубежом и в РФ на вооружении БПЛА оснащаются электрооптическими и инфракрасными камерами, которые позволяют получать изображения как днём, так и ночью в оптическом и инфракрасном диапазонах.
Известны также бортовые РЛС (в том числе - бокового обзора) сантиметрового диапазона (СМД), которые используются для получения изображений в этом диапазоне. Такие РЛС устанавливаются сейчас на самолётах. Raytheon AGP-79 и F/A –18 Super Hornet

Ведущие разработчики БПЛА в настоящее время ведут работы по установке систем радиолокации. Применение РЛС обеспечит всепогодное применение БПЛА.
Наиболее перспективным направлением в получении всепогодного наблюдения с применением БПЛА является разработка бортовой РЛС миллиметрового диапазона со сверхмалыми габаритными и весовыми характеристиками. При этом ставится задача достижения характеристик обнаружения и разрешающей способности, не уступающей оптическим системам.
Передовым решением в развитии РЛ для БПЛА является РЛ NanoSAR-A фирмы ImSAR, установленный на БПЛА Scan Eagle

NanoSAR представляет собой РЛ ММД (Ка –диапазон) с синтезированной апертурой, его масса около 1 кг.
В проекте на тему, предъявляемую к постановке, предполагается разработка технологии изготовления миниатюрного РЛ ММД, содержащего фазированную антенную решетку, который по весу и габаритам может быть установлен на отечественном БПЛА типа “Дозор-100”.
Выбор частотного диапазона Ka (26.5 - 40 Ггц) позволяет существенно уменьшить габариты и вес аппаратуры по сравнению с сантиметровым диапазоном. Однако, требования к технологической точности изготовления ФАР, а также к фазовой стабильности частот задающих генераторов оказываются значительно выше. Заданные характеристики в возбудителе ММД предполагается обеспечить за счет применения технологии изготовления генератора ММД нового типа, который в зарубежной технической литературе получил название оптоэлектронный осциллятор (ОЭО). Исполнитель темы обладает приоритетом н рядом российских патентов (№ от …, № от ) на это инновационное устройство, а также опыт проектирования, разработки технологии и изготовления действующих лабораторных образцов-протипов ОЭО на диапазон 8,2 ГГц.
РЛ, изготовленный по разработанной в данном проекте технологии, предлагается разместить на БПЛА “Дозор-100” .

Основные характеритики БПЛА “Дозор-100”
|
Размах крыла, м |
5.40 |
|
Длина, м |
3.00 |
|
Крейсерская скорость, км/ч |
120-150 |
|
Практическая дальность, км |
1200 |
|
Продолжительность полёта, ч |
10 |
|
Статический потолок, м |
4500 |
|
Масса полезной нагрузки, кг |
18 |
- Тактико-технические характеристики РЛ ММД
РЛ предназначен для обзора поверхности земли, получения исходных данных для последующего цифрового картографирования, а также для обнаружения объектов c заданной ЭПР на поверхности земли и определения их пространственных координат с точностью + 10- ÷15 см.
РЛ должен обеспечивать следующие технические характеристики:
- В режиме фронтального обзора:
|
№ |
Характеристика |
Значение |
Примечания |
|
1. |
Дальность обнаружения объекта с ЭПР =10 кв. м. (бронетехника) с вероятностью обнаружения 0.98 при Fл=0.01 |
8 км |
С высоты 1 км |
|
2. |
Дальность обнаружения объекта с ЭПР =1 кв.м. |
3.5 км |
С высоты 1 км |
|
3. |
Угловая разрешающая способность, град. |
1.0 |
|
|
4. |
Угол обзора передней полусферы по азимуту, град. |
+60 |
|
|
5. |
Угол обзора по углу места, град |
+20 -20 |
|
|
6. |
Разрешающая способность по дальности, м |
0.5 – 1.0 |
|
В режиме синтезированной апертуры (РСА):
|
№ |
Характеристика |
Значение |
Примечания |
|
1. |
Азимутальная (тангенциальная) разрешающая способность , м |
0,5 |
С высоты 1 км |
|
2. |
Азимутальная (тангенциальная) разрешающая способность , м |
0.5 |
С высоты 3,5 км |
|
3. |
Угол обзора, град. |
20 |
|
- Структурная схема РЛ ММД
РЛ построен на основе твердотельной, неподвижной относительно БПЛА и активной фазированной антенной решетки (АФАР) с электронным сканированием диаграммы направленности. В РЛ будет применена микропроцессорная цифровая обработка информационных сигналов.

Для обеспечения заданных технических характеристик при минимальных габаритах РЛ, в нём буут применены самые передовые современные методы цифровой обработки.
- Широкополосные сигналы с программируемой модуляцией.
- Малошумящие приёмные модули.
- АЦП входных сигналов и их дальнейшая миропроцессорная цифровая обработка.
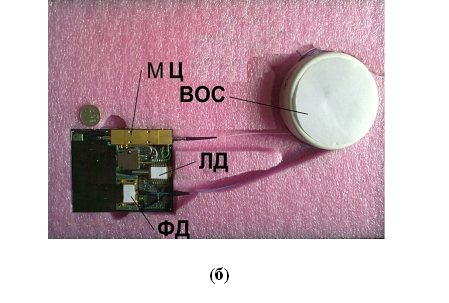
- Сверхмалошумящий генератор, построенный по разработанной технологии изготовления оптоэлектронного генератора (ОЭГ) ММД.
Сверхмалые габариты РЛ обеспечиваются за счет применения миниатюрных ОЭГ ММД и полностью цифровой оптимальной микропроцессорной обработки используемых в РЛ сверхширокополосных сигналов с помощью процессора на основе модуля FPGA с программируемой структурой.
- Основные технические характеристики РЛ
|
№ |
|
|
|
1. |
Длина волны, мм |
9 |
|
2. |
Несущая частота, ГГц |
33.3 |
|
3. |
Диаметр апертуры ФАР, см |
45.6 |
|
4. |
Количество элементов ФАР |
4096 |
|
5. |
КНД |
50.66 |
|
6. |
Вид излучаемого сигнала |
ФМ последовательность |
|
7. |
Длительность сигнала |
|
|
8. |
Ширина спектра сигнала, Мгц |
600 |
|
9. |
Излучаемая Мощность сигнала |
3 Вт |
|
10. |
Потенциал РЛС |
|
|
11. |
Чувствительность приемного устройства |
-80 дБ/Вт |
|
12. |
Потребляемая мощность |
|
Диаметр ФАР рассчитывается по требуемой ширине ДН антенны по уровню 0.707:
L=51·9=459 мм = 45,6 см.
Принимаем КНД равным приблизительно КНД = 2,22 L/l =50.66
Эти и другие табличные технические характеристики антенны будут более точно рассчитаны при эскизном проекте.
Вид модуляции и длительность сигнала определяются заданными тактико-техническими характеристиками (ТТХ) разрешения по наклонной дальности и дальности обнаружения объекта с заданной ЭПР при заданной вероятности обнаружения. Конкретные виды сигналов будут выбраны на этапе эскизного проекта. В целом сигнал должен быть широкополосным, с минимальным уровнем боковых лепестков в его функции неопределённости. Будет учитыватся необходимая для работы РЛ энергия сигнала или пропорциональная ей база сигнала, т. е. произведение длительности сигнала на ширину его спектра, а также потенциал П РЛ - величина, равная четвертой степени дальности, при которой РЛ обеспечивает отношение мощности сигнала к мощности собственных шумов равное единице при ЭПР цели 1 кв.м.
Оснащение БПЛА современными интеграторами наземной информации РЛС на базе оптоэлектронного генератора совместно с тепловизорами с инфракрасными излучателями, фотокамерой с большой разрешающей способностью позволяет в режиме реального времени получать комплексную информацию в любое время суток и независимо от погодных условий, тумана, дымки и т.п..
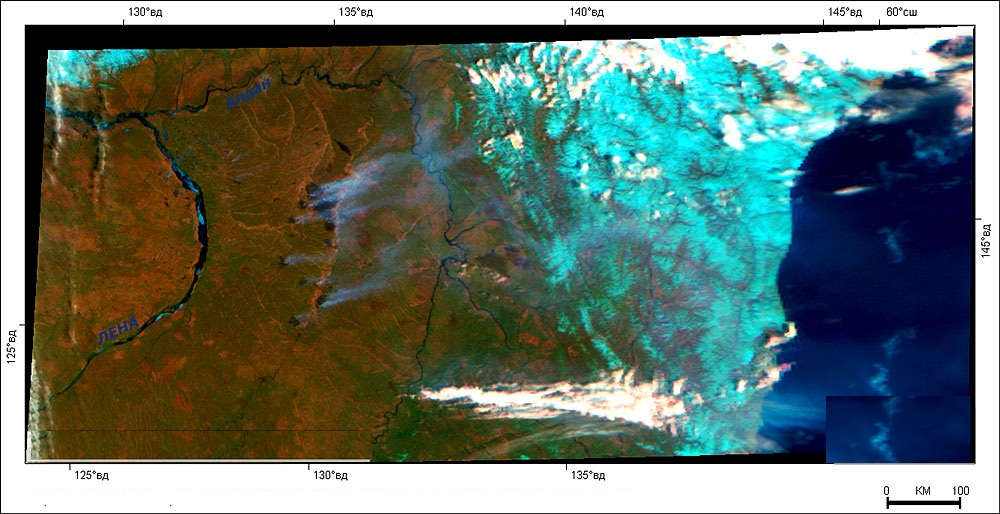
Примеры использования РЛС с другими интеграторами.
Съемка РЛС совместно с тепловизорами и инфракрасными излучателями.
Ортофотоплан съемка

РЛС, видео и фото разных объектов с высоты 20-3000м с привязкой координаты центра фотографирования.

Съемка с привязкой к карте местности
Мощность сигнала РЛС будет рассчитываться по уравнению дальности РЛ с учетом КНД и длины волны в ММД.
Необходимо будет также учесть затухание на рабочей длине волны ММД, а также влияние фазовых и амплитудных шумов, шумов интенсивности сигналов и кратковременной нестабильности параметров измерительной и контрольной бортовой аппаратуры БПЛА. Для получения оценок в проекте будет предусмотрены этапы натурных измерений и компьютерного моделирования важнейших процессов в схеме РЛ.
Приложение 1. Расчёт мощности.
По теории оптимального обнаружения детерминированного сигнала на фоне белого нормального шума ( стр452 [1].) Обнаружение сигнала при оптимальном приеме с заданными вероятностями D (правильного обнаружения) и F (вероятность ложной тревоги) не зависит от формы сигнала и определяется только соотношением энергии сигнала к спектральной мощности шума, т.е. отношением сигнал/шум на выходе согласованного усилителя промежуточной частоты - УПЧ.
Зависимость D от отношения Э/No (суммарной энергии сигнала к спектральной плотности шума на входе приёмника) при заданной F описывается кривыми обнаружения. (стр. 235 [2])
Принимаемая бортовым радиолокатором мощность равна [2]
Pп=(Pи * A2*s) /(l2*4p*R4)
Pи – излучаемая мощность, A – эффективная площадь антенны, s - ЭПР цели (кв.м.), l - длина волны, R – расстояние до цели.
Для выбранной антенны A=0.7*p*(0.456)2 /4 (площадь круга)
A=0.1143 кв.м.
Для заданных ТТХ
Pп=Pи*0.013069*10/(0.000081*4*p*4096*1012)
Pп=Pи*0.13069/41.69*1012=0.003134 * 10-12
Pп=Pи*3.134*10-9
Мощность излучателя
Pи=Pп/3.134*109=0.319*109
При чувствительности приёмника 100 мкВт Pи=31.9 КВт
Типичные значения чувствительности приёмника -80 dB/Вт Т.е. Pи=3.9 Вт .
[1.] В.И. Тихонов. Статистическая радиотехника.
[2.] Теоретические основы радиолокации. Под ред. Я.Д. Ширмана. Автор статьи Миров С.В., Серия "Военные технологии", 2013г. .